












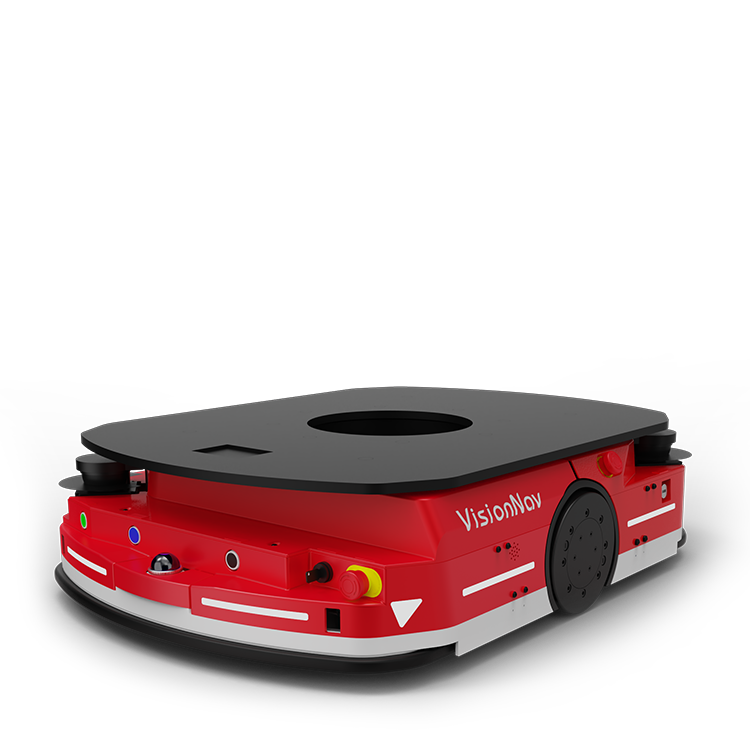
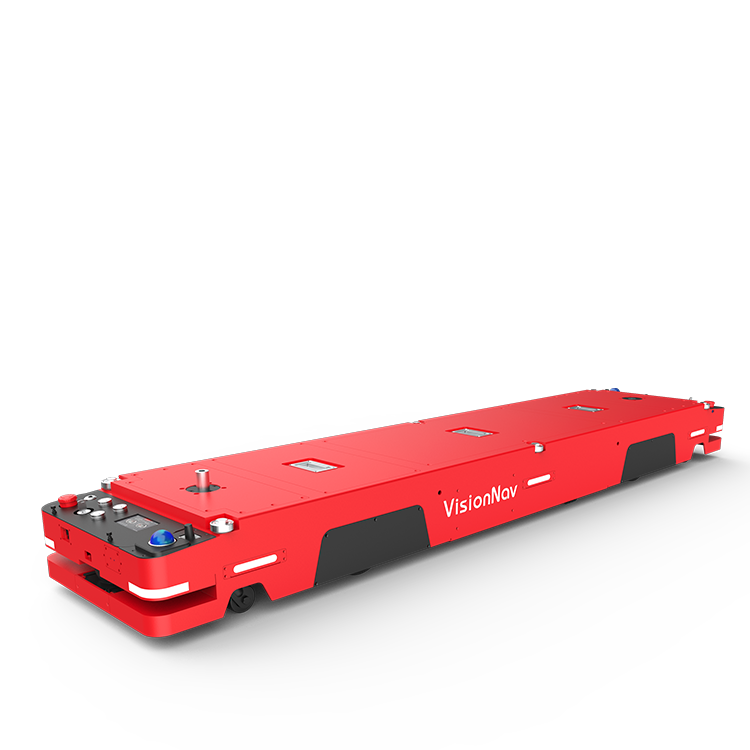
VNSL 14
Slim Forklift AGV/AMR
This Article is about AGV forklift applications in the auto parts industry, where the company deploys the highly flexible intelligent logistics solutions from VisionNav and realizes its automated operations in material handling as well as the smart informatization of WMS.

There are many kinds of auto parts, such as engine parts, brake parts, steering parts, etc. They are abnormal in shape and have exclusive abnormal carriers, under the effect of confusing stock management, these goods are hard to be tracked;
The operation of loading and unloading auto parts needs to go through multiple assembly processes, and requires high precision for autonomous forklifts to pick up and place vehicles;
The production of auto parts workshop requires 24-hour operation due to business fluctuations, it has features of long working hours, high labor intensity, and high repeatability;
By introducing highly flexible smart logistics solutions, VisionNav realizes the process of warehouse inbound and outbound with full materials, as well as the warehouse inbound and outbound with empty materials. At last, the warehouse storage location can be managed in a good way and 24 hours’ operations become possible, thus helping the customer improve the efficiency of the goods handling.
Full-Loaded AGV Inbound:
Full-Loaded AGV Outbound:

Self-adaptive Abnormal Carriers: The carriers for the project are specially customized to fit the auto parts. Based on the leading visual navigation module, the autonomous forklift can realize function of self-adaptive pickup and space detection, the perception accuracy of unmanned forklift can be controlled within ±5mm, and the stacking accuracy can be controlled within ±10mm;
Docking with Photo-taking Equipment: The autonomous forklift docks with the camera equipment configured on the project and will generate unique number information by taking pictures and uploading it to the database, then the WMS will automatically read the database information to realize the connection and update between goods information and warehouse location information;

Visualized WMS System: The WMS independently developed by VisionNav provides warehouse management functions for the project, which is more convenient to install and manage, and saves time and labor costs for the customer. The WMS can connect the project equipment and data information, which enables the visual display of the storage location information, refines the warehouse management, and improves the efficiency and accuracy of inventory management;
Collaborative Operation of Multi-AGVs and Cross-scenarios: This project is equipped with nearly 10 Slim series unmanned forklifts in the same workshop, and the staff can realize multi-vehicle deployment, path planning, collision avoidance, and other functions through the RCS system, multi-vehicle collaborative management can improve material handling efficiency and realize automated and intelligent logistics.